Princeton Satellite
|
The Core Control Toolbox provides you with sophisticated algorithms for control system design and estimation used for cutting edge design at PSS for over twenty years! The toolbox provides you with simulation tools, analysis functions and graphics to make your job easier. Numerous demos are provided and most functions have built-in demos. Full source code is provided to allow you to customize and function as needed and to fully understand what each function is doing! Add-on modules provide specialized functions for imaging, tracking and wind turbine control. |
 |
Control and Estimation
Control
The control functions allow you to work the way you want to work. You can approach your control design using many different techniques including frequency domain, state space and eigenstructure assignment.
Kalman Filters
The toolbox includes Kalman Filters, Extended Kalman Filters, Iterated Extended Kalman and Unscented Kalman Filters. All of the Kalman Filters use a common code format:
u.t = t;
u.y.data = xS(3,k);
u = KFPredict( u );
u = KFUpdate( u );
where u is a MATLAB data structure. This allows the two filtering steps to be used independently. For example, you can run the predict step multiple times while waiting for a measurement update. All of the filters work with the same data structures.
This allows the two steps to be used independently. Each Kalman Filter can handle multiple measurement sources and measurements arriving at different times. The measurements are in a data structure which includes a pointer to the measurement function allowing different measurements to be used easily.
All three Kalman Filters can be used interchangeably. The toolbox makes this easy to do. This greatly facilitates filter design and can help in filter testing.
Interactive Multiple Models
Interactive Multiple Model Systems (IMM) can also be used as part of an estimator. IMM employs multiple dynamic models to improve estimation of systems with different possible dynamics. Measurements are assigned to all of the models. The Interactive Multiple Model Systems are based on Jump Markovian Systems.
Robotics
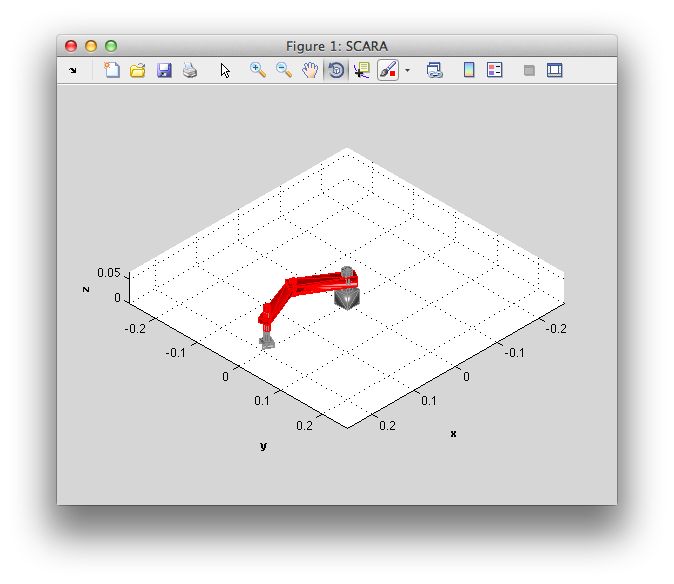
The toolbox includes a recursive Newton-Euler dynamics model that can handle a wide variety of robots including multi-arm robots! Demos of a SCARA robot arm, RP manipulator and multi-arm robot are provided. A general robot 3D drawing function is provided along with a dedicated SCARA drawing function. The image is of a multi-arm robot with a prismatic hinge at the base and two links with revolute hinges.
Click for a movie showing a SCARA robot following a straight line trajectory. The trajectory is computed by a dedicated SCARA inverse kinematics routine.
Chemical Process Control
Several dynamical models are included for chemical process control applications. These include a batch chemical reactor, continuously stirred tank reactors in series, a fluidized bed reactor and a fermenter. A nonlinear PH sensor model is also included.
Dynamics and Simulation
Models and simulations for a variety of dynamical systems are included. These include
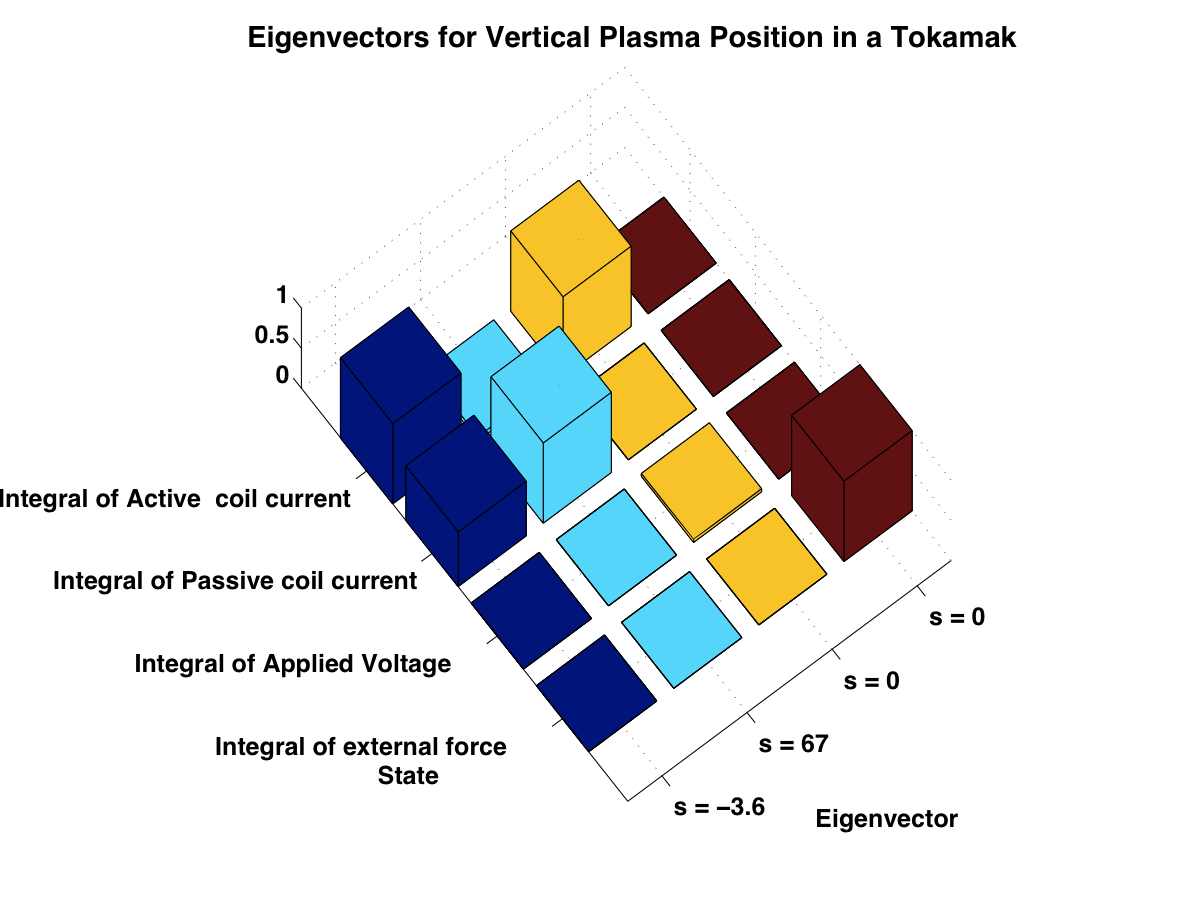
A model of plasma vertical positioning in a Tokamak.
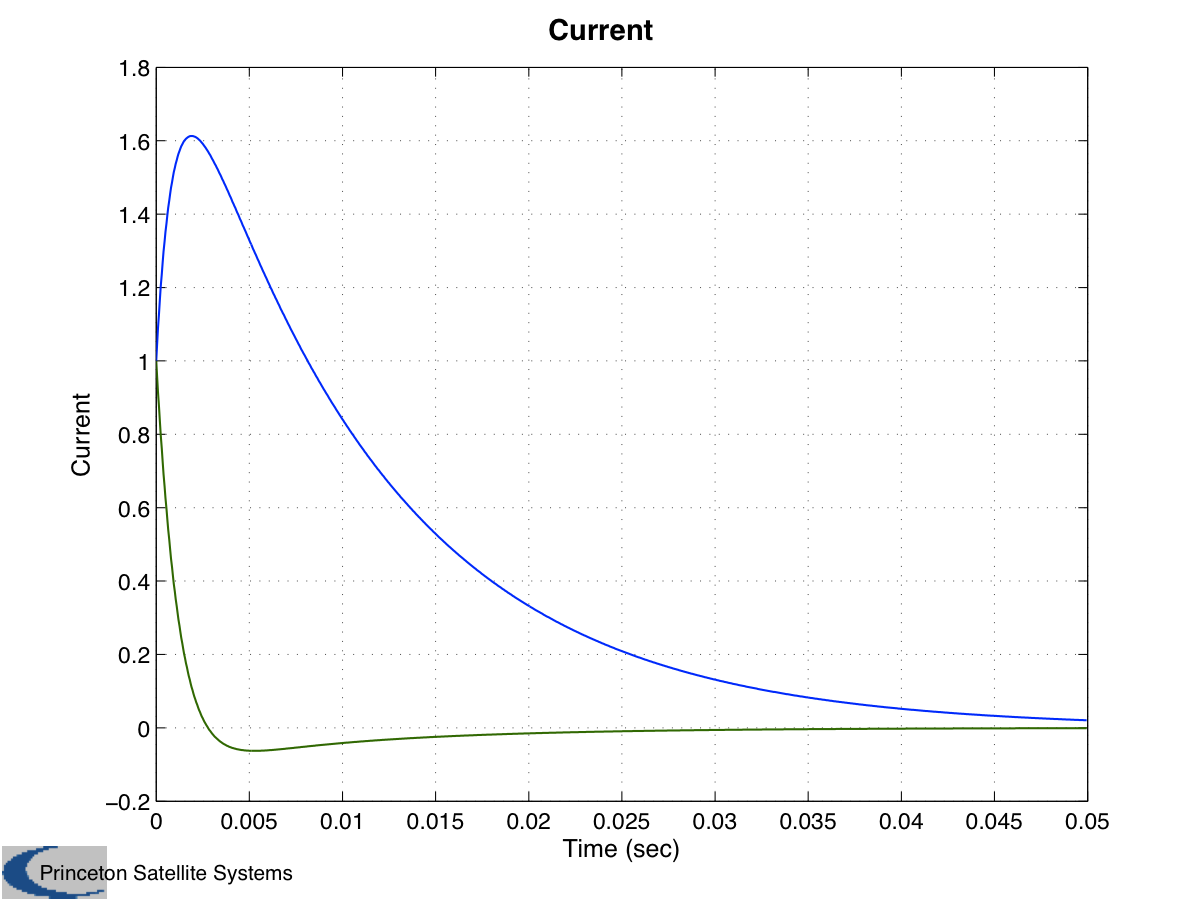
Simulation of a permanent magnet synchronous motor.
A simulation of an autombile suspension.
These models can help you get started with your own applications.
.